Nuevas estrategias basadas en geotecnologías de aplicación a la agricultura y ganadería de precisión
24 July 2023Automatización y Robotización
Mejora de Cultivos y Herramientas


El autor ha dedicado su tesis doctoral a demostrar el potencial de las geotecnologías como herramientas alternativas y complementarias destinadas a la mejora de la gestión de los sistemas de manejo agroganaderos en el ámbito económico, medioambiental y desde el punto de vista del bienestar animal.
Las geotecnologías han emergido como la piedra angular del nuevo paradigma digital en el que están actualmente inmersas la agricultura y la ganadería contemporáneas, en el que se enmarcan las denominadas agricultura y ganadería de precisión.
La obligada modernización a la que se ven sometidas las prácticas agroganaderas tradicionales viene desencadenada por el incipiente crecimiento demográfico y la consecuente demanda de productos agroalimentarios.
Esta drástica transformación del mundo rural se torna imprescindible no solo para conseguir abastecer las necesidades de una población creciente, sino para rescatar a un sector primario cada vez más castigado por los elevados precios de los insumos y los escasos beneficios que se perciben.
Como avales de esta necesaria reconversión de los sistemas de manejo agropecuarios, entran en juego pilares fundamentales de la productividad agrícola y ganadera como son la sostenibilidad medioambiental y el bienestar animal, ambos muy demandados en los productos de primera necesidad por una sociedad cada vez más concienciada con la producción respetuosa con el medio y con los animales.
Se planteó que dichas estrategias geotecnológicas sirvan también para ahondar en el aprendizaje de nuevos conocimientos agrícolas y ganaderos
Para lograr este objetivo, se plantearon una serie de aportaciones que permitieran dilucidar la idoneidad de dichas geotecnologías en la gestión agroganadera, en particular:
Considerando la importancia de los forrajes en los sistemas agroganaderos, se hace necesario realizar evaluaciones periódicas del estado nutricional, fisiológico y sanitario de los mismos a lo largo de su ciclo de crecimiento, labores que, hasta el día de hoy, se han realizado in situ con un gran consumo de tiempo y mano de obra.
Por tanto, se trató de demostrar la capacidad potencial de las imágenes captadas mediante vehículos aéreos no tripulados (UAV) para monitorizar y predecir la evolución de varias asociaciones forrajeras durante todo el ciclo de cultivo 2019-20.
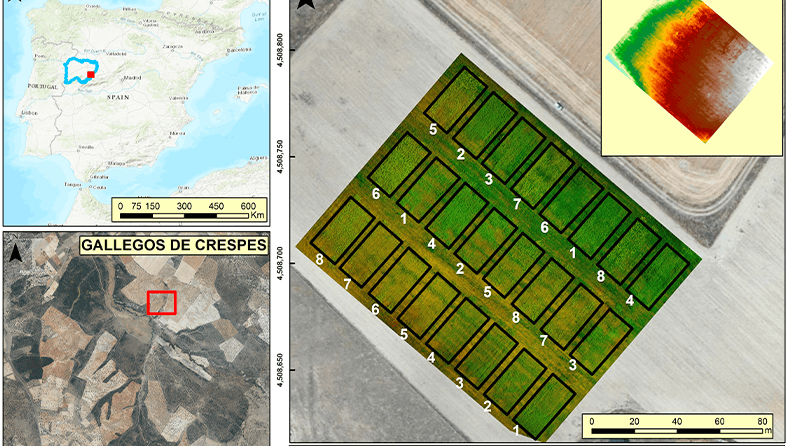
En este trabajo de investigación se utilizaron ocho asociaciones forrajeras diferentes cultivadas por triplicado (Figura 1): veza-cebada-triticale (VBT), veza-triticale (VT), veza-centeno (VR), veza-avena (VO), guisante-cebada-triticale (PBT), guisante-triticale (PT), guisante-centeno (PR) y guisante-avena (PO).
Las asociaciones que contenían veza se sembraron a razón de 140 kg/ha (70 % leguminosa - 30 % cereal), mientras que las que contenían guisante se sembraron a razón de 130 kg/ha (60 % leguminosa - 40 % cereal). La siembra tuvo lugar el 19 de octubre de 2019 y la cosecha el 10 de junio de 2020.
Se monitorizaron seis parámetros biofísicos (Tabla 1) mediante metodologías destructivas y no destructivas.
Paralelamente, se llevaron a cabo siete misiones de dron utilizando un equipo formado por un dron DJI Inspire 1 con una cámara multiespectral (5 bandas) Micasense RedEdge-M acoplada (Figura 2).
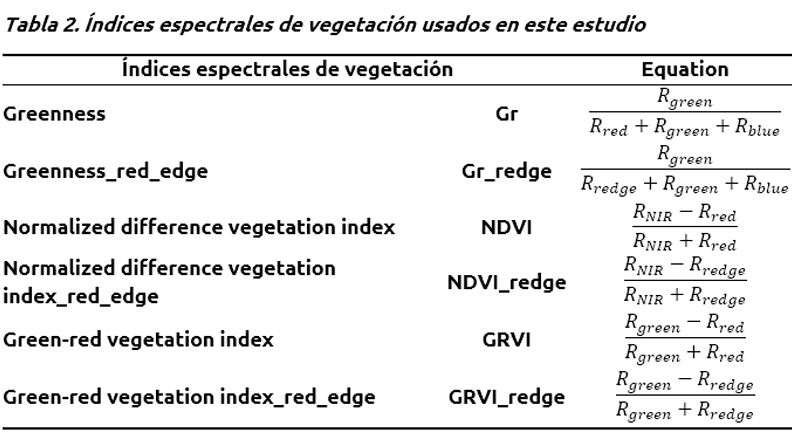
A partir de las imágenes recolectadas, se calcularon seis índices de vegetación (Tabla 2), mediante distintas combinaciones algebraicas de las reflectancias captadas en las cinco bandas del espectro electromagnético registradas por la cámara.

Para el análisis de los datos se realizó un análisis exploratorio de su variabilidad y un posterior análisis de correlación, a partir de los cuales se plantearía un modelo predictivo de la producción forrajera en caso de que dichos resultados fueran satisfactorios.
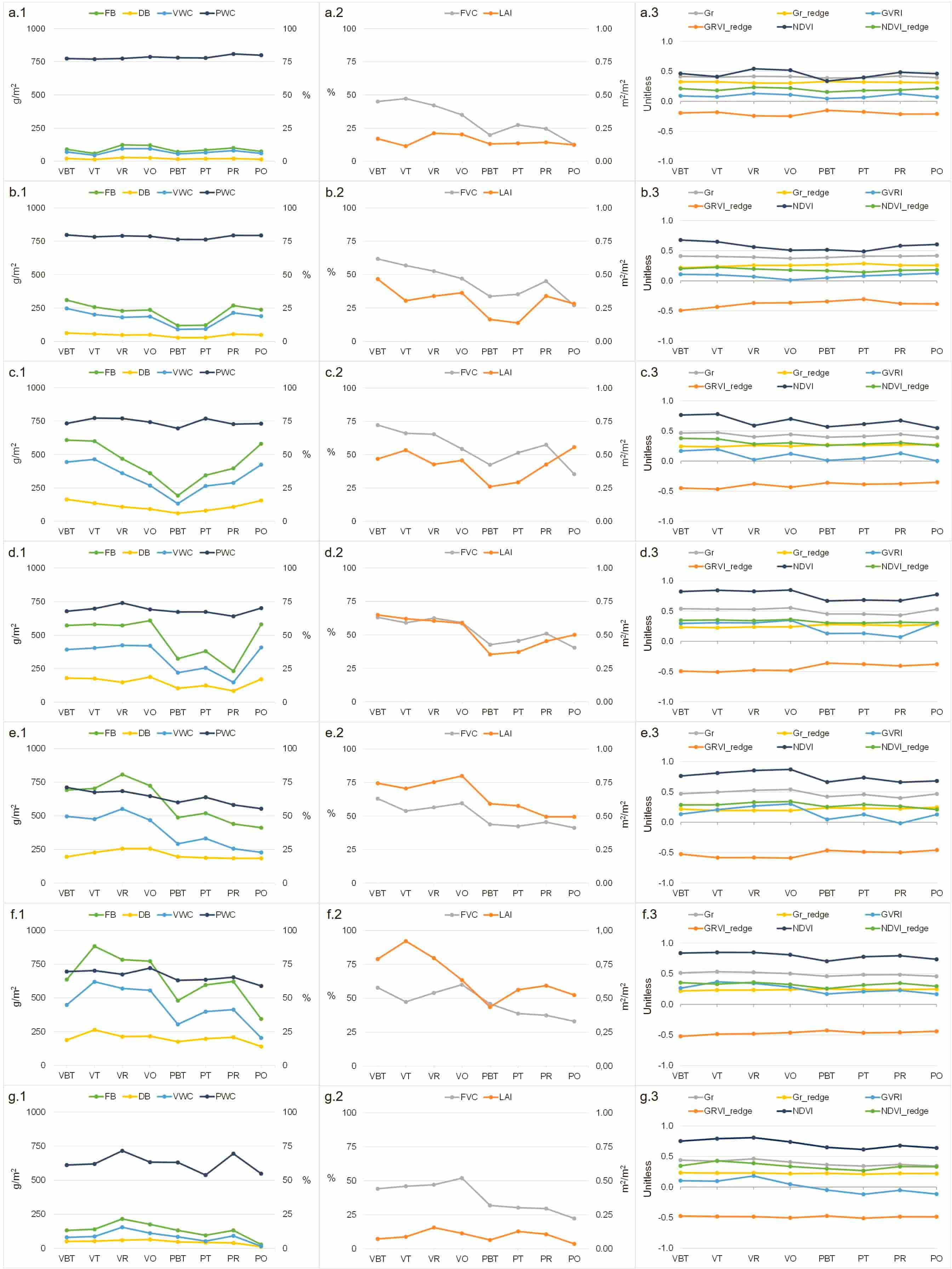
Los resultados del análisis exploratorio revelaron que, a medida que el ciclo de cultivo avanzó, los valores de todas las mediciones de campo aumentaron progresivamente en el eje de ordenadas (Figura 3), hasta que empezaron a disminuir de nuevo conforme los forrajes se acercaban a su punto de madurez para ser cosechados.
Las asociaciones que contenían veza como leguminosa mostraron una mayor adaptabilidad a las condiciones edafoclimáticas y, por tanto, una mayor producción de biomasa
Estos resultados coinciden con el análisis de la curva temporal de cada asociación (Figura 4), ya que se observaron valores más altos de biomasa vegetal en las asociaciones de veza (Figura 4a-d) que en las de guisante, produciéndose las mayores diferencias en fechas próximas a la cosecha.
También, la evolución temporal de las distintas asociaciones mostró un patrón de crecimiento similar para todos los parámetros de campo estudiados (excepto el PWC, y en menor medida, el FVC), mostrando todas las asociaciones una curva en forma de meseta, típica del ciclo de los cultivos de secano.

Las correlaciones fueron muy fuertes y significativas para cada asociación a lo largo de su ciclo de crecimiento, lo que parece indicar que la evolución de las asociaciones podría ser monitorizada a partir de los índices espectrales.
Esto sugirió consecuentemente la realización de un modelo predictivo (basado en la regresión de mínimos cuadrados parciales, PLS).
Integrando las observaciones multiespectrales en el modelo PLS, se predijeron los parámetros agronómicos de las asociaciones forrajeras con una fiabilidad superior al 50 % (R2 Predicha), excepto la FVC (Tabla 3).
A la luz de los resultados obtenidos, se pudo concluir que los índices de vegetación VNIR obtenidos a partir de cámaras a bordo de vehículos aéreos no tripulados (UAV) podrían constituir una alternativa eficaz y asequible a la laboriosa y destructiva toma de muestras sobre el terreno para el seguimiento de los cultivos
En términos generales, se detectó una fuerte relación de dependencia lineal entre las variables explicativas (mediciones de campo) y las observadas (índices espectrales), con una notable capacidad predictiva del modelo PLS.
El topillo campesino (Microtus arvalis Pallas, 1798) es una plaga agrícola muy destructiva. Es un microtínido semifosorial que habita principalmente en paisajes agrícolas como prados, márgenes de campos y parcelas de alfalfa.
Sin embargo, durante los periodos de explosión poblacional, los topillos se dispersan, invaden y colonizan otros hábitats subóptimos, incluyendo zonas cultivadas con una amplia gama de cultivos (por ejemplo, cereales, legumbres, colza, girasol, etc.).
Por este motivo, su seguimiento es esencial, no solo para una adecuada gestión y previsión de explosiones poblacionales, sino también para determinar con precisión el impacto que tiene en los campos afectados.
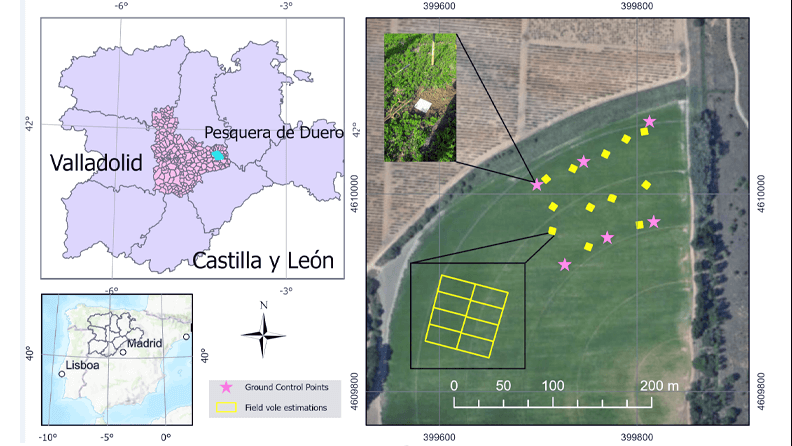
En este escenario, se presentaron varias alternativas basadas en la combinación de drones y cámaras multiespectrales para estimar los daños causados por el topillo campesino en un alfalfar (Medicago sativa L.) localizado en el centro-norte de la Península Ibérica (Figura 5).
Para ello, se realizaron cuatro misiones de dron entre diciembre de 2020 y mayo de 2021, utilizando el mismo equipo descrito en la sección 3.1.
Estos vuelos fueron coincidentes con la realización de mediciones de campo, en las que se evaluó el grado de colonización activa del topillo y el daño causado sobre la cobertura vegetal en 12 unidades experimentales de 6x6 m2.
Se geolocalizaron las áreas dañadas con un equipo GPS para utilizarlas como puntos de validación de la información obtenida remotamente
Para la estimación del daño causado sobre la cobertura vegetal (distinción entre área dañada y área no dañada) a partir de las imágenes captadas con el dron, se propusieron cuatro métodos experimentales:
Los resultados de precisión (Tabla 4) indicaron que la segmentación del NDVI fue el método más preciso (precisión global superior al 80 % para todas las fechas), aunque todas las metodologías tuvieron una precisión similar (más del 70 % de media).
NDVI: normalized difference vegetation index; SVM: support vector machine; ISODATA: iterative self-organizing data analysis; y OORF: object oriented random forest.
Las cuatro metodologías de clasificación mostraron una tendencia similar, la cual fue también corroborada por las estimaciones de campo de las zonas dañadas y del número de huras.
En todos los casos, de diciembre a febrero se observó una cubierta cada vez más dañada, tras lo cual dichos daños comenzaron a descender drásticamente (Figura 6).
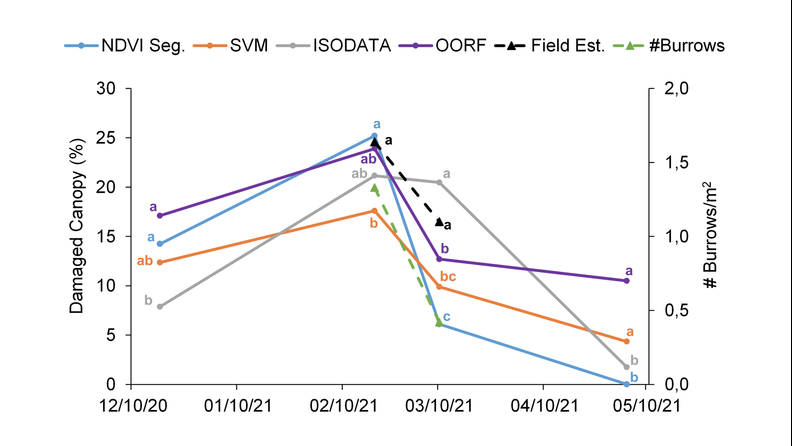
De acuerdo con estos resultados, se exploró la correlación entre el porcentaje de daños y el número de huras/m2 (Tabla 5).
Las correlaciones resultantes fueron todas estadísticamente significativas (p < 0,01), siendo la clasificación SVM la que presentó una correlación más fuerte.
Así, se pudo determinar finalmente que los vehículos aéreos no tripulados, combinados con la clasificación de imágenes multiespectrales, son una metodología eficaz y fácilmente transferible para la evaluación y seguimiento de los daños causados por el topillo campesino en las parcelas agrícolas. Todas las metodologías de clasificación estudiadas mostraron rendimientos similares, si bien es cierto que la segmentación del NDVI fue la que arrojó los resultados más precisos y fiables.
Tradicionalmente, en el sector ovino español, el control y la supervisión de los animales se han llevado a cabo en base a las prácticas tradicionales de pastoreo, que suelen implicar observaciones directas, continuas o periódicas por parte del pastor.
Sin embargo, dado el gran tiempo necesario para adquirir esos conocimientos, junto con la influencia de los factores sociales y económicos del momento, dichos conocimientos tradicionales sobre el comportamiento del ganado en pastoreo están a punto de desaparecer.
En esta investigación se planteó una alternativa novedosa para evaluar las actividades de pastoreo de dos rebaños de ovejas de raza Churra (ambos en la misma zona, pero separados 10 años) mediante técnicas de monitorización basadas en los sistemas de posicionamiento global (GPS) y en la teledetección.
El estudio se desarrolló en 800 hectáreas de pasto comunales (Figura 7), registrando en el primer periodo de seguimiento (2009-10) geolocalizaciones cada 5 min (4.240 registros), mientras que en el segundo (2018-20) se tomaron cada 30 min (7.636 registros).
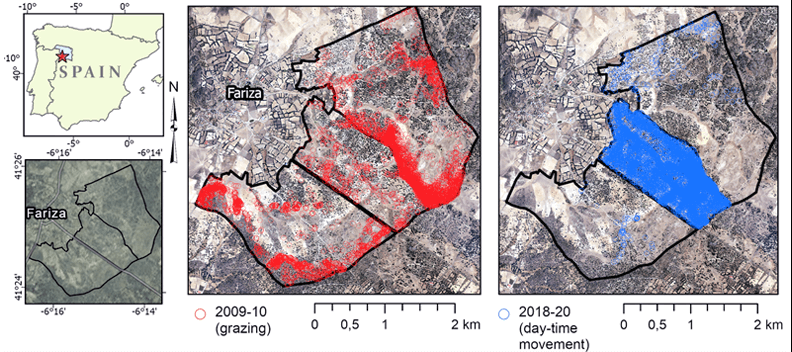
Los datos se agruparon en función de la franja horaria día/noche y de la actividad (descanso, desplazamiento o pastoreo), medida en función de la velocidad de desplazamiento del animal
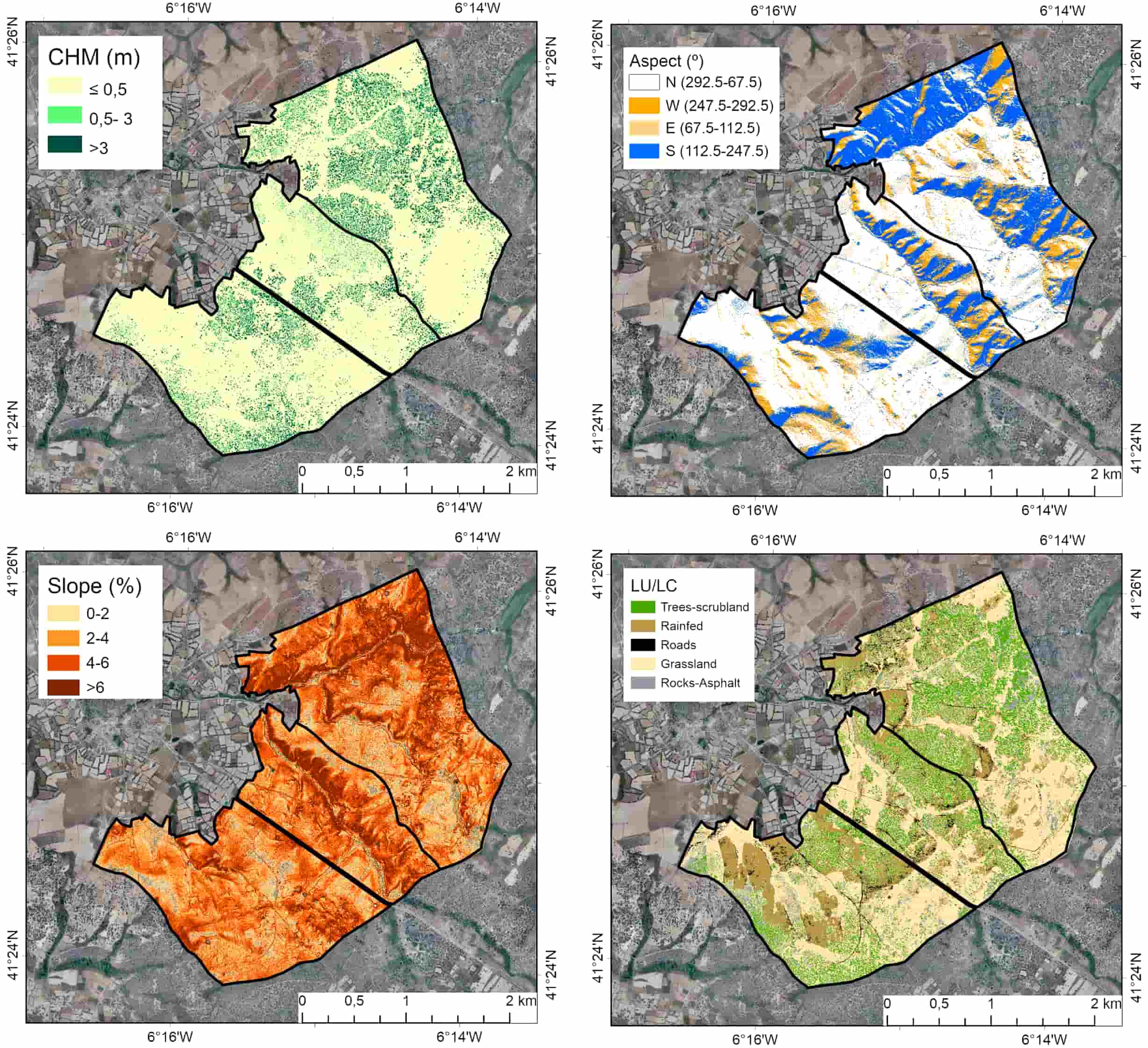
Para estudiar los principales atributos topográficos del terreno (pendiente y su orientación) así como la altura de la vegetación, se utilizó un conjunto de datos LiDAR (Figura 8).
Además, se realizaron mosaicos de cuatro ortofotografías en el infrarrojo visible y se clasificaron para obtener el mapa de uso y cobertura del suelo (LU/LC).
A continuación, se superpusieron las localizaciones GPS a las características del terreno, y se evaluaron las relaciones entre las localizaciones y las características del terreno mediante un test Chi-cuadrado.
Para obtener un mayor detalle de la distribución espacial de las geolocalizaciones, se calcularon también tres estadísticas geoespaciales (distribución direccional, densidad Kernel y análisis de puntos calientes)
Los resultados obtenidos en ambos periodos de seguimiento sugieren que la distribución espacial de las ovejas en pastoreo libre no es aleatoria, sino que desarrollaron patrones habituales de conducta.
Los rebaños mostraron fuertes preferencias por las zonas de pastoreo con suaves pendientes orientadas al norte, donde predomina la capa herbácea formada por especies pratenses. Esta elección resultó ser deliberada, ya que se comprobó en dos periodos de estudio independientes de dos rebaños que fueron evaluados según diferentes enfoques estadísticos.
Dichos resultados fueron coincidentes con los obtenidos en el análisis pormenorizado de geoestadísticas espaciales (densidad de Kernel y análisis de puntos calientes) realizado en la segunda campaña, en los que se estudiaron las preferencias de las ovejas en el punto caliente detectado (Figura 9).
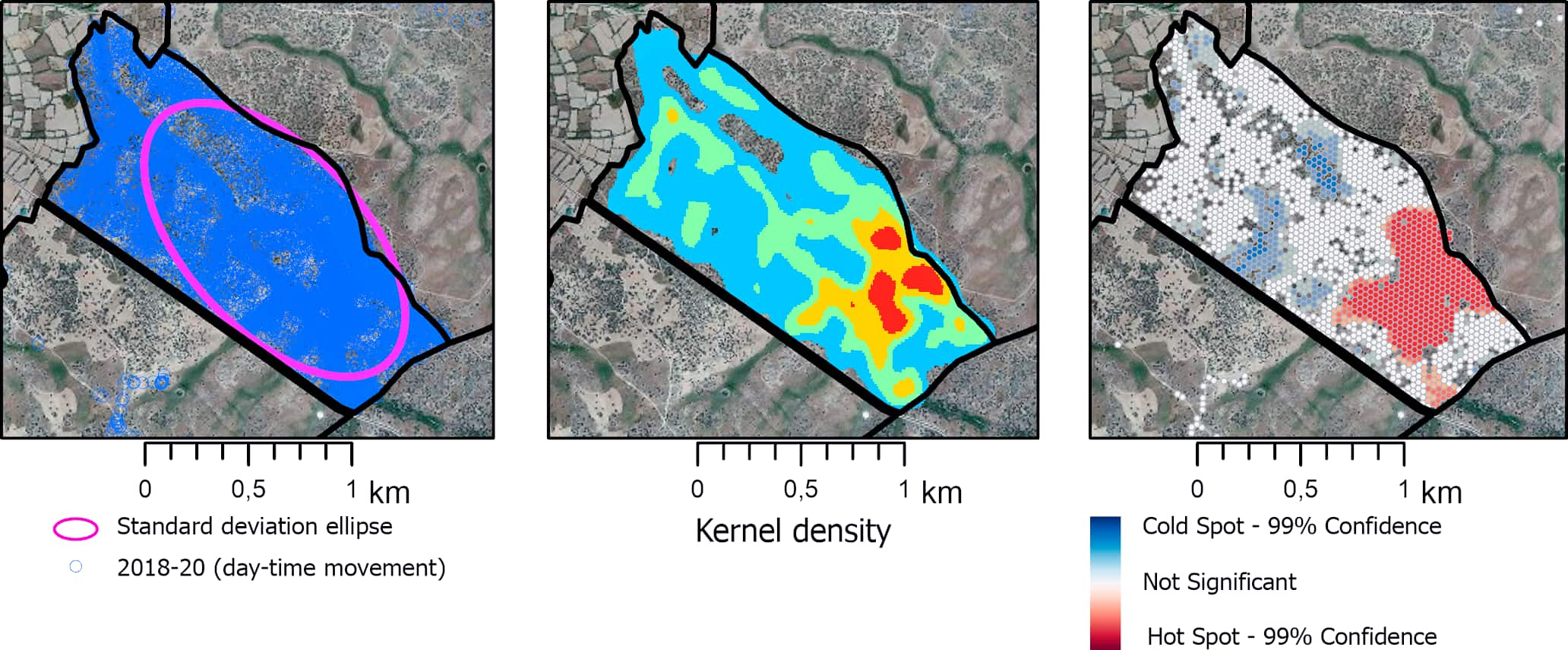
Figura 9. Elipse de desviación estándar, densidad de Kernel y análisis de puntos calientes.
En resumen, podría aseverarse que las ovejas eligen las zonas de pastoreo que ofrecen el alimento más fresco y de mayor calidad nutricional
Por tanto, se ha puesto de manifiesto que las geotecnologías son una potente herramienta para demostrar la influencia de los atributos ambientales y del terreno en el comportamiento espacial no aleatorio de las ovejas en pastoreo.
Mediante esta contribución científica se ha pretendido poner de manifiesto la idoneidad de una serie de procedimientos y herramientas, fundamentalmente del ámbito de la teledetección, en su aplicación en el sector agroganadero.
Se han presentado tres aplicaciones de muy diversa índole, aunque podrían plantearse muchas más, ya que no solo es un campo de investigación imparable en la actualidad, sino que prácticamente ya está operativo en muchos aspectos de la gestión agrícola y ganadera.
Como corolario final, aplicable a todas las investigaciones realizadas en este trabajo doctoral, es necesario señalar que las geotecnologías no pretenden desbancar o sustituir los conocimientos agroganaderos tradicionales, puesto que son la base para poder interpretar la información y los resultados obtenidos por estos procedimientos más vanguardistas.
Más bien todo lo contrario, deben ser tomadas como herramientas complementarias a dichos conocimientos, es decir, como un recurso adicional para fundamentar el proceso de toma de decisiones en aquellos sistemas agropecuarios sostenibles con el medio natural, como es el caso de la agricultura y la ganadería extensiva.
Deben servir de apoyo a las observaciones tradicionales realizadas por agricultores y ganaderos, abriendo así un camino hacia nuevas formas de gestión de los espacios de cultivo y pastoreo, lo que redundará en beneficios económicos, sociales y medioambientales para el conjunto de la población mundial.
En este enlace se puede consultar la tesis doctoral completa:
https://www.educacion.gob.es/teseo/imprimirFicheroTesis.do?idFichero=5GpYFXjboU4%3D







